Spatial Data Structure
While it would be possible to test all pairs of particles for influences, it is not very efficient.
The O(n2) complexity of this approach makes it very slow for higher particle counts. To
speed up the detection process, usually a spatial data structure is used. Instead of testing
all possible pairs of particles, each particle is first inserted into the spatial data structure
which then provides a way to quickly find only the particles that currently reside within a
particular region.
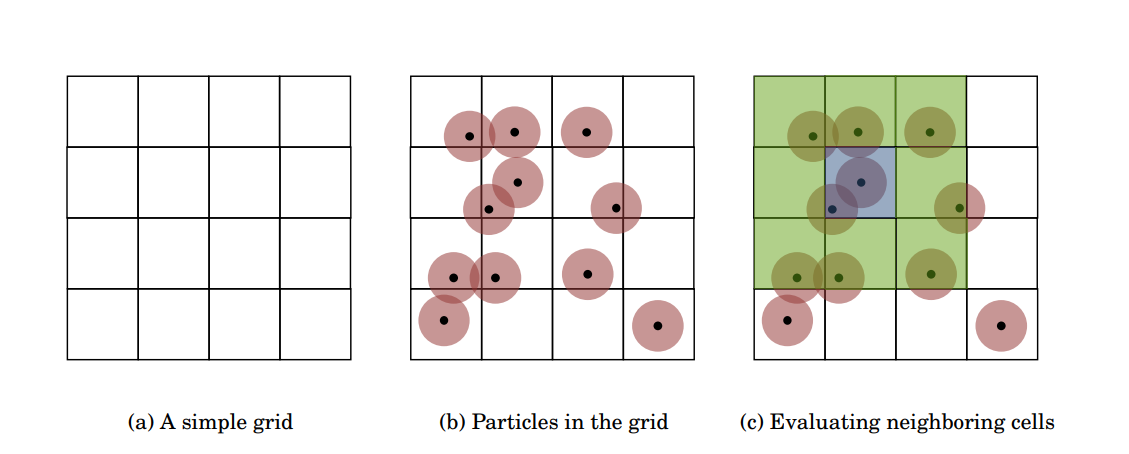
We used a simple, uniform grid data structure by following these steps:
1. Launch a kernel for each particle. Compute the grid cell the particle currently is in
and use atomicAdd to count the number of particles in each cell (cellCount).
2. Run a prefix sum (scan) on cellCount to get memory offsets for each cell.
3. Launch another kernel similar to the first, again using atomicAdd for counting the
particles in each cell. Use the return value of the atomic operation to determine the
particles position within the cell. Combine this offset with the offset from the prefix
sum to get the index in a global array grid.
4. Launch a kernel for each particle. Again compute the particle’s cell, look up the
memory offset for this cell from the prefix sum result and iterate through all particles
in the same cell to determine possible collisions. As particles can be at cell boundaries
and thus reach into neighboring cells, extend the search to all 26 neighboring cells.